前言
隨著城市土地資源日趨緊張,智能機械式立體車庫成為商業商圈、住宅小區、公共交通樞紐擴容停車空間的核心方案。而車輛搬運設備作為立體車庫的核心執行單元,其運行穩定性、存取效率、適配性與安全性,直接決定車庫整體運營能力與使用體驗。
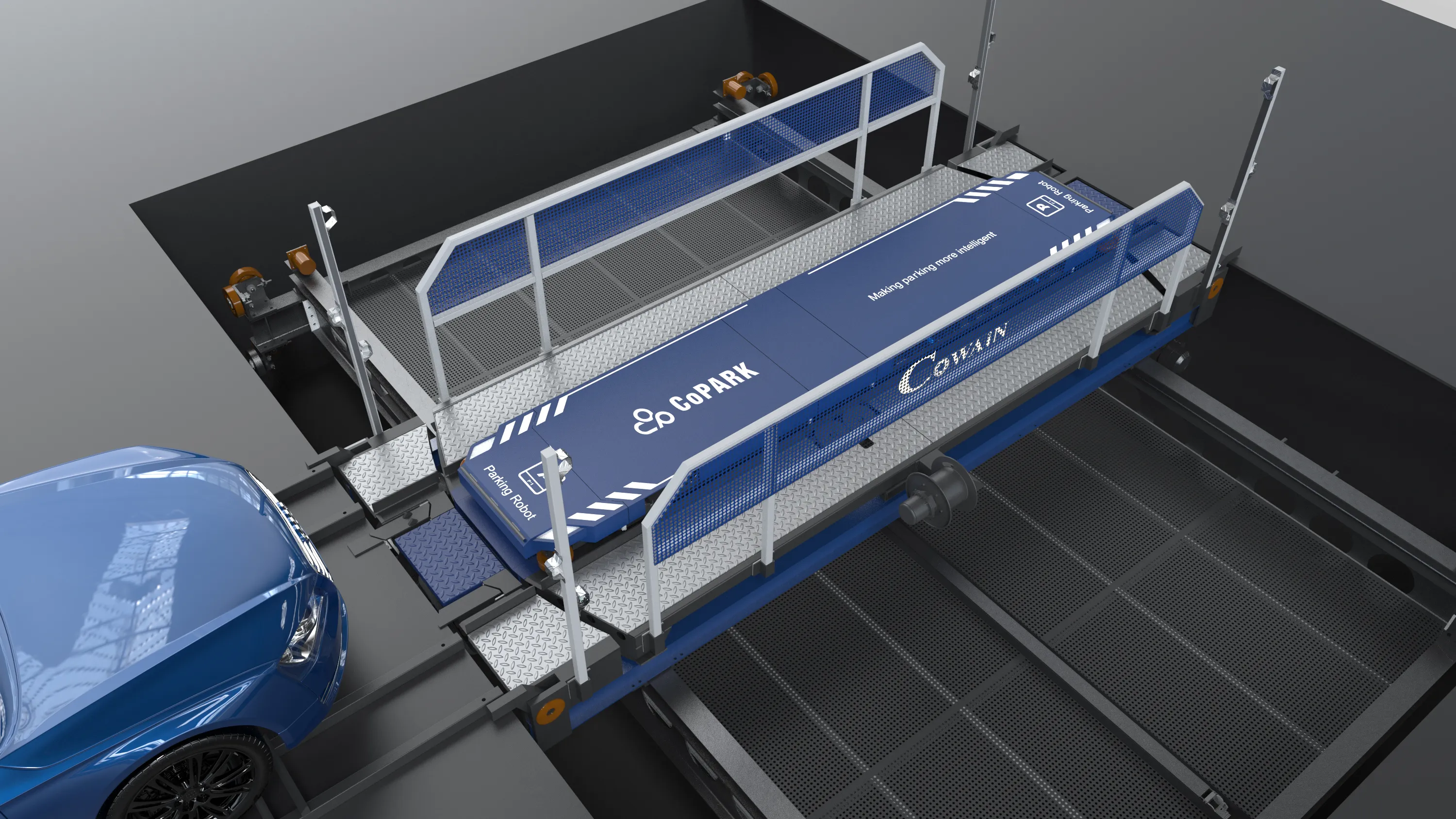
本文介紹的機械式立體車庫伸縮齒搬運器,是專為各類智能立體車庫、平面移動停車系統研發的專用車輛搬運設備,摒棄傳統車台板搬運模式,採用無台板伸縮梳齒交接技術,可高效完成車輛平移、升降對接、車位精準存取等核心動作。下文將結合設備全落地使用場景,深度拆解其精細化電氣設計細節,全方位解析產品的實用價值與技術優勢。
相較於傳統搬運方式,這款伸縮齒搬運器核心優勢集中於高適配、高穩定、高安全、三大維度。產品採用輕量化緊湊結構設計,可適配不同軸距、底盤高度的民用車輛,突破傳統設備的車型限制;依託成熟的電氣控制系統,實現低速平穩啟停、高速穩定搬運,大幅提升車庫存取車效率;搭載全套電氣安全防護機制,可適應車庫潮濕、多塵、長時間連續運行的複雜工況;同時模組化電氣佈局設計,大幅降低設備故障概率與後期運維難度。
目前在用的伸縮齒搬運器按照其驅動方式可分為兩種,一種為普通電機驅動,另一種為伺服電機驅動。其在動作原理上並無區別,但在傳動設計及電氣控制設計上存在著天壤之別。

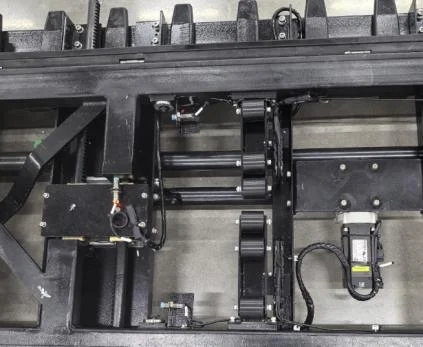
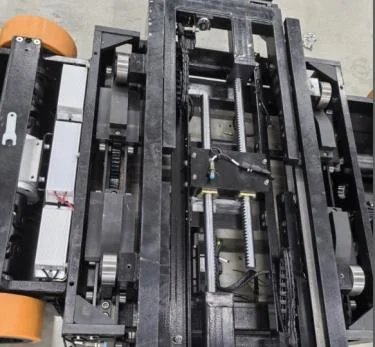
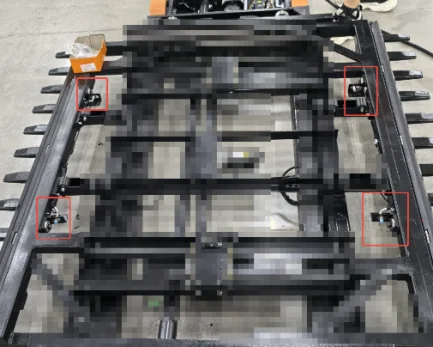
伺服伸縮齒

三相電機伸縮齒
由上圖可見,無論從設備結構還是電氣佈局都完全不一樣,下面將從電氣角度詳細分析兩者之間的區別,重點闡述伺服控制搬運器的電氣設計注意點。
電氣設計細節深度拆解
一、檢測原理
兩種搬運器的檢測原理基本相同,因為機械結構設計的區別,導致檢測的方式有較大區別。
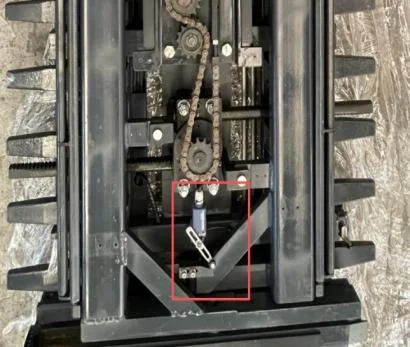
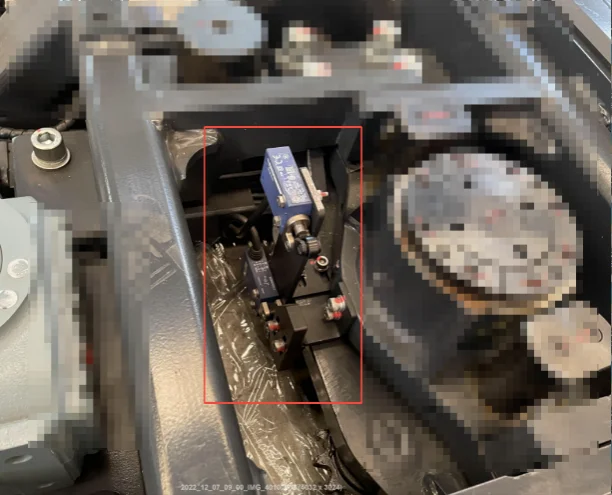
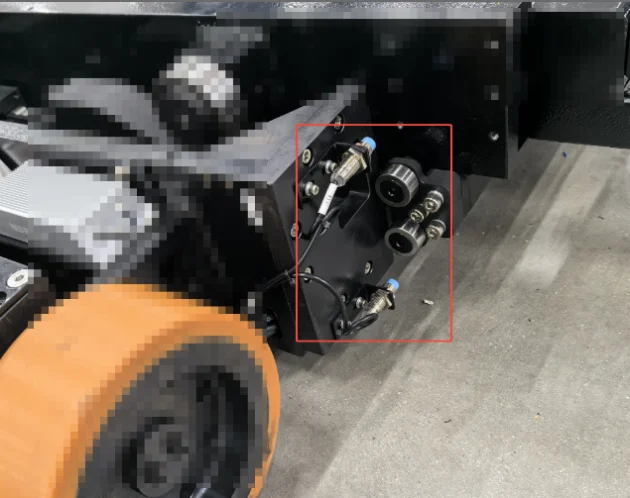
1-定位感測器設計方式
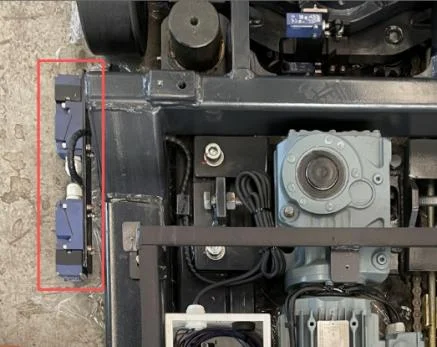
兩種搬運器的定位感測器,一種採用磁性開關,一種採用鏡反射開關。
兩種定位方式都是依靠感測器找定位塊的方式進行定位。
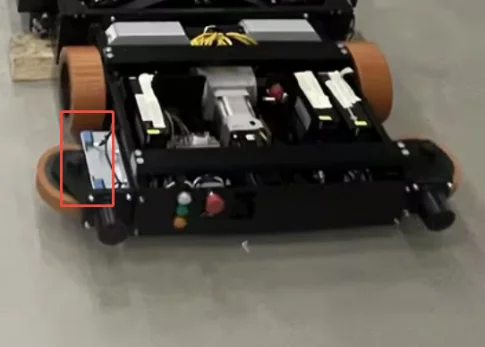
2-伸縮齒收回感測器檢測
三相電機版前部和後部伸縮齒收回開關
伺服電機板前部和後部伸縮齒收回到位感測器
檢測伸縮齒收回方式一樣,都是依靠檢測梳齒架本身的位置來觸發開關。
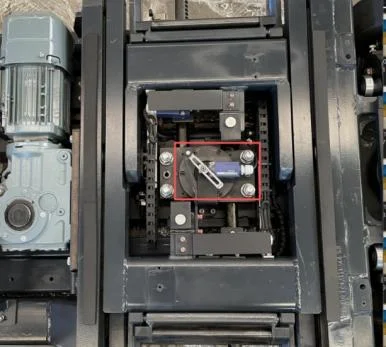
3-伸縮齒伸出感測器檢測
伺服電機版前部和後部伸縮齒伸出開關


三相電機版前部和後部伸縮齒伸出到位
兩種設備伸出到位檢測方式一樣,原理都為伸縮翻板觸碰到車輪後,感應到感測器觸發信號。
4-頂升上下到位檢測
兩種設備的頂升到位檢測方式基本相同,開關固定,通過檢測升降到達位置來確定升降是否完成。
二、電控系統
1-電控硬體系統設計
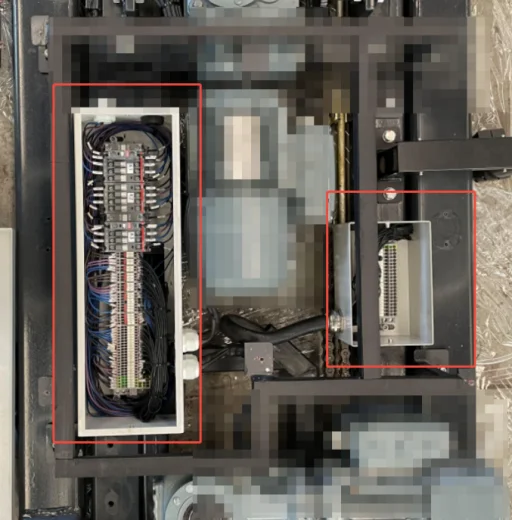
伺服設備採用分散式模組化電氣架構,整體控制系統由主PLC控制器、伺服驅動模組、感測檢測模組、伸縮執行模組、通訊交互模組五大單元組成,各模組獨立運行、協同聯動。模組化設計優勢顯著,一方面電路佈線規整、線路分區清晰,強弱電分離佈局,有效避免線路交叉干擾,降低短路、漏電故障概率;同時標準化電氣接口設計,完美適配市面主流立體車庫控制系統,相容性極強。

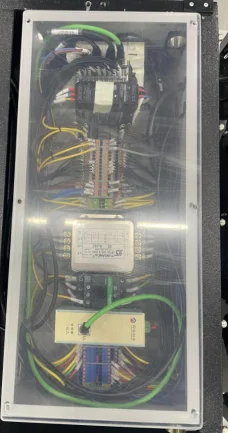
防塵透明蓋板設計,可在不拆蓋的情況下觀察內部情況,盡量增加檢修的便利性。控制箱於設備固定處採用緩衝墊隔離,設備運行時的震動能大部分被隔離墊所吸收。另外,所有的接線端子均採用彈簧壓接,杜絕設備震動導致的接線鬆動問題。
搬運器上有完整的控制系統,所以伺服搬運器能夠作為一個標準品的形式存在,僅需對其進行三相供電即可,其餘通過無線通訊即可實現動作控制。
三相電機版搬運器中的電箱僅配置接觸器和接線端子,因為空間的限制,控制系統無法集成於搬運器內部,必須將設備的信號及控制輸出到外圍進行控制。故該搬運器上需要連接兩組電纜,一組控制為控制電機輸出的強電系統,一組為採集搬運器所有控制信號的電纜。兩組電纜線芯較多,並且外部需要兩組彈簧卷筒進行線纜收放控制,從總的成本控制和設備穩定性來講,並不如伺服版本的高。
2-電氣控制系統的設計
設備搭載高精度智能邏輯控制電路,依託PLC核心控制系統,搭配伺服驅動閉環控制演算法,實現行走、伸縮、對位、交接全流程精準控制。控制系統內建自主適配邏輯,可根據車輛重量、軸距、停放位置偏差,自動微調伸縮齒伸縮行程與行走軌跡,實現無偏差精準交接車輛,同時電路整合故障自檢與智能反饋功能,設備運行過程中即時檢測線路狀態、感測器數據、電機工況,一旦出現異常,立即觸發聲光警報並記錄故障代碼,同步上傳至車庫中控系統,方便運維人員快速排查故障。此外支援自動啟停、聯動升降、智慧調度等功能,可適配多設備協同作業,大幅提升車庫整體存取效率。
相比於伺服控制系統,傳統的三相電機控制依託於變頻器,變頻器控制在實現精準定位方面遠不如伺服控制系統,並且電機的響應速度也差距明顯。這兩種主要的差別導致存取車速度存在明顯區別,伺服系統比三相電機系統速度快30%。
但傳統三相電機並不是毫無優勢,因為其採用普通電機,故對於環境要求不高,在高溫高濕及震動環境下,設備表現穩定。並且其不依賴於通訊對其控制,直接排除了由於通訊速度或通訊故障導致的設備運行延遲或無法控制的情況,搬運器一般和橫移車配套使用,採用一個PLC同時控制橫移車和搬運器,從內部數據交互來考慮更加及時穩定可控。
結尾總結
以上就是對伸縮齒搬運器兩種不同結構的分析和比對,作為立體車庫的核心部件,兩種搬運器各有優缺點,需要根據不同的項目進行匹配。未來隨著智能停車行業不斷升級,產品將持續優化電氣智能控制與節能技術,適配更多智能化、集約化停車場景,為城市靜態交通提質增效、空間擴容提供核心設備支撐。
About the Author